DUIKEN NIEUWS
Nu vliegen oceaanrobots solo

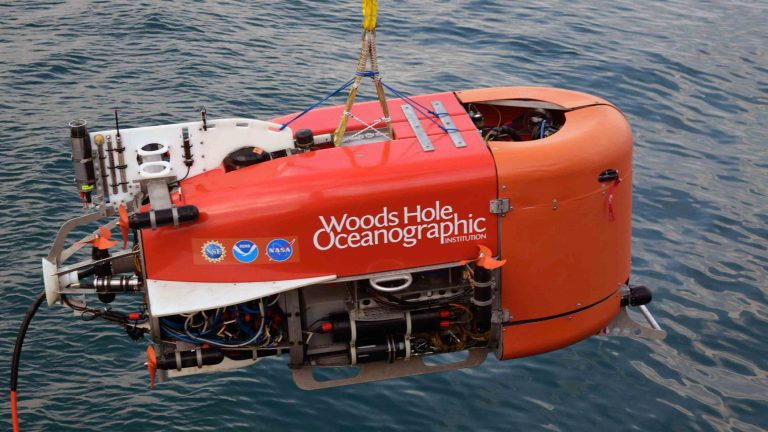
Foto: Evan Lubofsky, Woods Hole Oceanografisch Instituut.
Het eerste bekende exemplaar van een onderwaterrobot die autonoom een sedimentair monster neemt, heeft plaatsgevonden op Kolumbo, een actieve vulkaan op 500 meter diepte voor het Griekse eiland Santorini in de Egeïsche Zee.
De robotarm die het monster nam voor een internationaal team van onderzoekers, werd gemonteerd op een hybride, op afstand bestuurbaar voertuig genaamd Nereid Under Ice (NUI), ontwikkeld door Woods Hole Oceanographic Institution (WHOI) uit Massachusetts.
“Dat een voertuig een monster kon nemen zonder dat er een piloot achter zat, was een enorme stap voorwaarts”, zegt WHOI-wetenschapper Rich Camilli. “Een van onze doelen was om de joystick eruit te gooien, en dat is ons gelukt.”
De onderzoekers bestudeerden de ‘ruwe, met chemicaliën beladen’ omgeving van Kolumbo en zijn microbiële levensvormen, terwijl ze ook onderzochten in hoeverre oceaanrobots zonder menselijke tussenkomst zouden kunnen verkennen.
De slimme NUI ter grootte van een auto maakt gebruik van op kunstmatige intelligentie gebaseerde geautomatiseerde planningssoftware, waaronder een planner genaamd Spock.
Hierdoor kon het beslissen welke vulkanische locaties bezocht moesten worden en kon het autonoom monsters nemen en deze via een “slurpmonsterslang” opzuigen.
Volgens wetenschapper Gideon Billings van de Universiteit van Michigan, wiens code werd gebruikt om het eerste monster te verzamelen, zal een dergelijke automatisering NASA in staat stellen oceaanwerelden buiten ons zonnestelsel te verkennen.
“Als we deze grootse visie hebben om robots naar plaatsen als Europa en Enceladus [de manen van respectievelijk Jupiter en Saturnus] te sturen, zullen ze uiteindelijk onafhankelijk en zonder de hulp van een piloot moeten werken”, zei hij.
11 januari 2020
Toekomstig onderzoek, waarbij ook het Australian Center for Field Robotics, het Massachusetts Institute of Technology en het Toyota Technological Institute in Chicago betrokken zullen zijn, zal omvatten opleiding oceaanrobots om te zien als ROV-piloten, met behulp van ‘gaze tracking’-technologie, en het bouwen van een interface in menselijke taal waarmee wetenschappers robots rechtstreeks kunnen aanspreken, in plaats van via een piloot.
“Uiteindelijk kunnen we een netwerk van cognitieve oceaanrobots zien met een gedeelde intelligentie die een hele vloot bestrijkt, waarbij elk voertuig samenwerkt als bijen in een bijenkorf”, zegt Camilli. “Het gaat veel verder dan het verliezen van de joystick.”
Het project werd gefinancierd door NASA en het National Science Foundation National Robotics Initiative.

